원문: http://www.arduino.cc/en/Main/ArduinoBoardNano
Overview(개요)
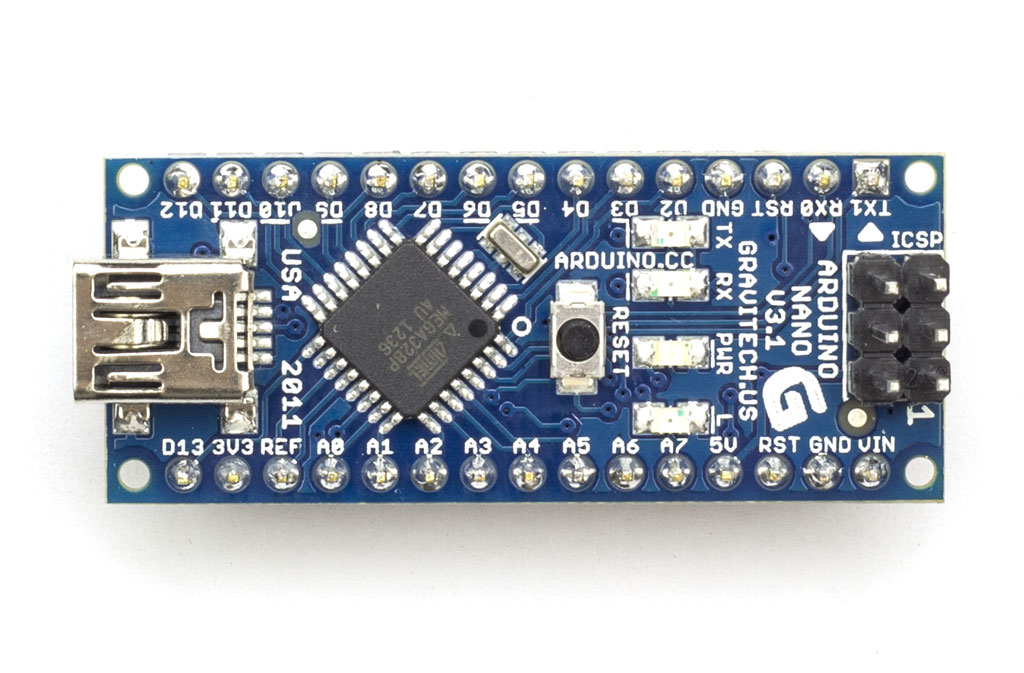
The Arduino Nano is a small, complete, and breadboard-friendly board based on the ATmega328 (Arduino Nano 3.x) orATmega168 (Arduino Nano 2.x). It has more or less the same functionality of the Arduino Duemilanove, but in a different package. It lacks only a DC power jack, and works with a Mini-B USB cable instead of a standard one. The Nano was designed and is being produced by Gravitech.
아두이노 나노는 작고 완전한, ATmega328(아두이노 나노 3.x) 또는 ATmega168(아두이노 나노 2.x)에 기반한 브레드보드 친화적인 보드이다. 이것은 아두이노 Duemilanove의 같은 기능과 비교했을때 거의 유사하다. 하지만 이들은 다른패키지다. 나노는 DC 파워 젝을 가지고 있지 않지만, 대신에 표준 Mini-B usb 케이블로 작업 할 수 있다. 나노는 Gravitech에 의해 디자인되고 생산되었다.
Schematic and Design(도식과 디자인)
Arduino Nano 2.3 (ATmega168): manual (pdf), Eagle files. Note: since the free version of Eagle does not handle more than 2 layers, and this version of the Nano is 4 layers, it is published here unrouted, so users can open and use it in the free version of Eagle.
Specifications(상세):
| Microcontroller | Atmel ATmega168 or ATmega328 |
| Operating Voltage (logic level) | 5 V |
| Input Voltage (recommended) | 7-12 V |
| Input Voltage (limits) | 6-20 V |
| Digital I/O Pins | 14 (of which 6 provide PWM output) |
| Analog Input Pins | 8 |
| DC Current per I/O Pin | 40 mA |
| Flash Memory | 16 KB (ATmega168) or 32 KB (ATmega328) of which 2 KB used by bootloader |
| SRAM | 1 KB (ATmega168) or 2 KB (ATmega328) |
| EEPROM | 512 bytes (ATmega168) or 1 KB (ATmega328) |
| Clock Speed | 16 MHz |
| Dimensions | 0.73" x 1.70" |
| Length | 45 mm |
| Width | 18 mm |
| Weigth | 5 g |
운용 전압은 5v, 입력전압은 7 ~ 12v가 권장되며, 6 ~ 20v까지가 한계이다.
14개의 디지털 입출력 핀을 가지며, 이중 6개는 pwm출력이 가능하다.
8개의 아날로그 입력핀을 가지고 있다.
입출력핀의 전류는 핀당 40mA이며, 16KB(ATmega168) 또는 32KB(ATmega328)의 플래시 메모리를 가지는데 이중 2KB를 부트로더가 사용한다.
1KB(ATmega168)또는 2KB(ATmega328)의 스태틱 메모리를 가지고 있으며, 512바이트 또는 1KB의 EEPROM을 가지고 있다.
클럭스피드는 16MHz이며, 0.73인치 * 1.70인치크기다.
Power(전원):
The Arduino Nano can be powered via the Mini-B USB connection, 6-20V unregulated external power supply (pin 30), or 5V regulated external power supply (pin 27). The power source is automatically selected to the highest voltage source.
아두이노 나노는 Mini-B usb연결을 통해서 전원을 공급하거나, 6 ~ 20v의 정제되지 않은 외부전원(30번핀) 또는 5v의 정제된 외부 파워 공급(27번핀)이 가능하다. 파워 공급원은 가장높은 전압 소스로 부터 자동선택된다.
Memory(메모리)
The ATmega168 has 16 KB of flash memory for storing code (of which 2 KB is used for the bootloader); the ATmega328has 32 KB, (also with 2 KB used for the bootloader). The ATmega168 has 1 KB of SRAM and 512 bytes of EEPROM (which can be read and written with the EEPROM library); the ATmega328 has 2 KB of SRAM and 1 KB of EEPROM.
ATmega168은 코드 저장을 위해 16KB의 플래시 메모리를 가진다(2KB는 부트로더가 사용중이다);
ATmega328은 32KB를 가지고 있다(역시 2KB를 부트로더가 사용한다).
ATmega168은 1KB의 SRAM과 512 바이트의 EEPROM(EEPROM 라이브러리로 읽거나 쓰기가 가능)
을 가지고, Atmega328은 2KB의 SRAM과 1KB의 EEPROM을 가진다.
Input and Output(입력과 출력)
Each of the 14 digital pins on the Nano can be used as an input or output, using pinMode(), digitalWrite(), anddigitalRead() functions. They operate at 5 volts. Each pin can provide or receive a maximum of 40 mA and has an internal pull-up resistor (disconnected by default) of 20-50 kOhms. In addition, some pins have specialized functions:
입출력에 사용될 수 있다. 이핀들은 5V전압으로 운용되고, 각각의 핀들은 최대 40mA의 전류를 받거나
내보낼 수 있으며, 내부에 20 ~ 50K옴의 풀업 저항을 가진다(기본적으로 연결되어있지는 않다).
부가적으로, 몇개의 핀들은 특별한 기능을 가지고 있다.
- Serial: 0 (RX) and 1 (TX). Used to receive (RX) and transmit (TX) TTL serial data. These pins are connected to the corresponding pins of the FTDI USB-to-TTL Serial chip.
- External Interrupts: 2 and 3. These pins can be configured to trigger an interrupt on a low value, a rising or falling edge, or a change in value. See the attachInterrupt() function for details.
- PWM: 3, 5, 6, 9, 10, and 11. Provide 8-bit PWM output with the analogWrite() function.
- SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). These pins support SPI communication, which, although provided by the underlying hardware, is not currently included in the Arduino language.
- LED: 13. There is a built-in LED connected to digital pin 13. When the pin is HIGH value, the LED is on, when the pin is LOW, it's off.
- 시리얼 : 0(RX) 1(TX). TTL 시리얼 데이터를 수신(RX) 또는 송신(TX)한다. 이 핀들은 FTDI USB-to-TTL 시리얼칩의 해당하는 핀에 연결되어있다.
- 외부인터럽트 : 2와 3. 이들핀은 low값, 상승에지, 하강에지값에 대해서 인터럽트를 트리거할 수 있게 설정가능하다. attachInterrupt()함수를 통해서 자세한것을 보라.
- SPI:10(SS), 11(MOSI), 12(MISO), 13(SCK). 이 핀들은 SPI통신을 지원한다, 근본적으로 하드웨어를 통해서 공급되지만,
- 현재는 아두이노 언어에 포함되어있지 않다.
- LED: 13번. 이것은 13번 디지털핀에 연결된 내부장착 LED이다. 핀의 값이 HIGH일때 LED는 켜지며, LOW일때 꺼진다.
The Nano has 8 analog inputs, each of which provide 10 bits of resolution (i.e. 1024 different values). By default they measure from ground to 5 volts, though is it possible to change the upper end of their range using theanalogReference() function. Analog pins 6 and 7 cannot be used as digital pins. Additionally, some pins have specialized functionality:
나노는 8개의 아날로그 입력을 가지며, 각각은 10비트 해상도를 지원한다(예 1024개의 다른값들).
기본적으로 이들은 그라운드 ~ 5V까지 측정하는데, analogReference() 함수를 사용해서 이 범위의 상한 값을 변경하는 것이 가능하다. 아날로그 핀 6과 7은 디지털 핀으로 사용될 수 없다. 부가적으로, 몇개의 핀은
특별한 기능을 가진다.
- I2C: A4 (SDA) and A5 (SCL). Support I2C (TWI) communication using the Wire library (documentation on the Wiring website).
- I2C: A4(SDA), A5(SCL). Wire 라이브러리를 통한 I2C(TWI) 통신을 지원한다.
There are a couple of other pins on the board:
- AREF. Reference voltage for the analog inputs. Used with analogReference().
- Reset. Bring this line LOW to reset the microcontroller. Typically used to add a reset button to shields which block the one on the board.
- AREF : 아날로그 입력의 기준전압. analogReference()함수와 이용된다.
- Reset : LOW값을 가해서 마이크로컨트롤러를 리셋시킨다. 일반적으로 쉴드의 보드에 리셋버튼을 추가하는것에 사용된다.
See also the mapping between Arduino pins and ATmega168 ports.
Communication(통신)
The Arduino Nano has a number of facilities for communicating with a computer, another Arduino, or other microcontrollers. The ATmega168 and ATmega328 provide UART TTL (5V) serial communication, which is available on digital pins 0 (RX) and 1 (TX). An FTDI FT232RL on the board channels this serial communication over USB and the FTDI drivers (included with the Arduino software) provide a virtual com port to software on the computer. The Arduino software includes a serial monitor which allows simple textual data to be sent to and from the Arduino board. The RX and TX LEDs on the board will flash when data is being transmitted via the FTDI chip and USB connection to the computer (but not for serial communication on pins 0 and 1).
아두이노나노는 컴퓨터, 다른아두이노, 또는 다른 마이크로 컨트롤러와 통신하기위한 기능들을 가지고 있다.
ATmega168과 ATmega328은 UART TTL (5V)시리얼 통신을 지원하며, 디지털핀 0(RX)과 1(TX)를 통해서이용할 수 있다. 이시리얼의 보드의 채널은 FTDI FT232RL 시리얼 통신칩으로 USB를 통해서 통신하며, FTDI drivers는 컴퓨터에 가상의 com포트를 공급한다. 아두이노 소프트웨어는 시리얼 모니터를 포함하는데, 단순한 텍스트형 데이터를 아두이노에 보내거나 받을 수 있다.보드의 RX, TX LED들은 FTDI칩이 USB연결을 통해서 컴퓨터에 연결되어, 데이터를 전송할때 작동한다(핀0과 1을 통한 통신일때는 작동하지 않음).
A SoftwareSerial library allows for serial communication on any of the Nano's digital pins.
The ATmega168 and ATmega328 also support I2C (TWI) and SPI communication. The Arduino software includes a Wire library to simplify use of the I2C bus; see the documentation for details. To use the SPI communication, please see theATmega168 or ATmega328 datasheet.
SoftwareSerial라이브러리는 나노의 임의의 디지털핀을 통한 시리얼 통신을 지원한다.
ATmega168이나 Atmega328은 I2C(TWI)와 SPI통신 또한 지원한다. 아두이노 소프트웨어는 I2C버스를 이용하기위한 간략한 Wire라이브러리를 포함하는데, 자세한 것은 documentation를 보라.
SPI통신을 사용하기 위해, ATmega168 또는 ATmega328의 데이터 시트를 보라.
Programming(프로그래밍)
The Arduino Nano can be programmed with the Arduino software (download). Select "Arduino Diecimila, Duemilanove, or Nano w/ ATmega168" or "Arduino Duemilanove or Nano w/ ATmega328" from the Tools > Board menu (according to the microcontroller on your board). For details, see the reference and tutorials.
아두이노 나노는 아두이노 소프트웨어를 통해서 프로그램될 수 있다(download). Tools > Board메뉴의
"Arduino Diecimila, Duemilanove, 또는 Nano w/ ATmega168" 또는 "Arduino Duemilanove 또는 Nano w/ ATmega328" 보드를 선택한다(당신의 보드가 사용하는 마이크로 컨트롤러에 맞는것으로). 자세한것은
The ATmega168 or ATmega328 on the Arduino Nano comes preburned with a bootloader that allows you to upload new code to it without the use of an external hardware programmer. It communicates using the original STK500 protocol (reference, C header files).
아두이노 나노의 Atmega168또는 ATmega328에는 미리 bootloader가 구워져 있으며, 이것은 외부의 하드웨어 프로그래머 장치 없이 새로운 코드를 업로드 할 수 있게 한다. 이것은 오리지널 STK500 프로토콜을 통해서 통신한다(reference, C header files).
You can also bypass the bootloader and program the microcontroller through the ICSP (In-Circuit Serial Programming) header using Arduino ISP or similar; see these instructions for details.
당신은 부트로더를 우회할 수 있으며, Arduino ISP 또는 이와 유사한 것을 사용해 ICSP헤더(인서킷 시리얼프로그래밍)를 통해서 마이크로 컨트롤러를 프로그램할 수 있다. 자세한것은 these instructions를 보라.
Automatic (Software) Reset(소프트웨어형태의 자동리셋)
Rather then requiring a physical press of the reset button before an upload, the Arduino Nano is designed in a way that allows it to be reset by software running on a connected computer. One of the hardware flow control lines (DTR) of theFT232RL is connected to the reset line of the ATmega168 or ATmega328 via a 100 nanofarad capacitor. When this line is asserted (taken low), the reset line drops long enough to reset the chip. The Arduino software uses this capability to allow you to upload code by simply pressing the upload button in the Arduino environment. This means that the bootloader can have a shorter timeout, as the lowering of DTR can be well-coordinated with the start of the upload.
아두이노 나노는 업로드 전에 물리적형태의 리셋버튼을 누르는것을 요구하기 보다는, 연결된 컴퓨터에서 소프트웨어 형태로 리셋 할 수 있게 디자인되었다.
This setup has other implications. When the Nano is connected to either a computer running Mac OS X or Linux, it resets each time a connection is made to it from software (via USB). For the following half-second or so, the bootloader is running on the Nano. While it is programmed to ignore malformed data (i.e. anything besides an upload of new code), it will intercept the first few bytes of data sent to the board after a connection is opened. If a sketch running on the board receives one-time configuration or other data when it first starts, make sure that the software with which it communicates waits a second after opening the connection and before sending this data.





